
应用上下文
面向无人叉车 AGV 项目的转向驱动单元、减速机与控制逻辑方案。
挑战
叉车 AGV 开发需要同时处理窄巷道转向、变载荷工况与高安全要求,是一个高耦合集成问题。
解决方案
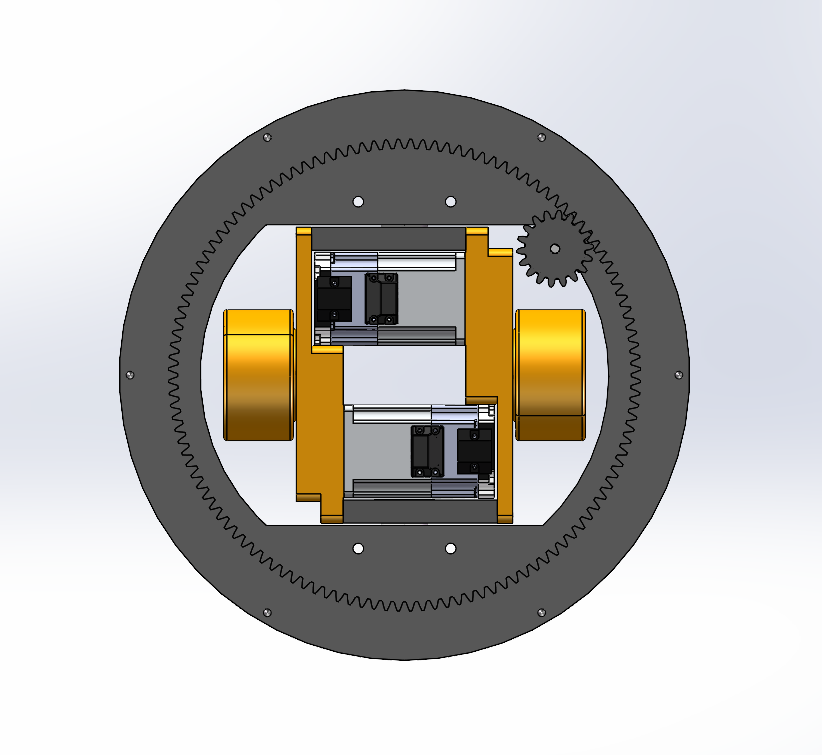
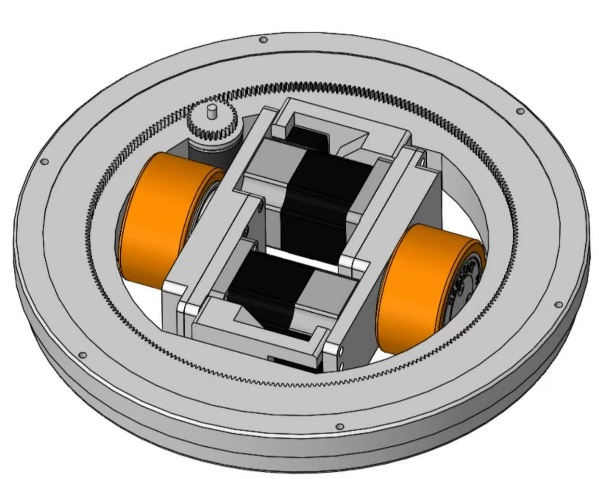
采用伺服转向单元、运动控制器与安全外设,简化航向修正和载荷感知路径控制。 伺服转向单元 控制器与导航 安全外围
工况条件
Aisle
Narrow-aisle warehouse route
Safety
Front safety envelope and crossing protection
Payload
Variable pallet load
Steering
High-torque heading correction
结果指标
Buyer Stage
Engineering evaluation
Turning Radius
Narrow-aisle steering validated
Engineering Review
Subsystem stack ready for integrator review
相关组件
与此应用场景关联的产品。
传动与轴承族
ZC RH90 精密减速机
适用于高要求转向与驱动架构的低回差减速机。
Slug: zc-precision-reducer-rh90
回差: < 1 arc-min
效率: 97%+
机座尺寸: RH90


导航耗材与传感器族
ZC 安全激光雷达 LS3
用于 AGV 安全区域防护与路线感知的障碍检测激光雷达。
Slug: zc-safety-lidar-ls3
扫描范围: 270° 扫描
防护等级: IP65
输出接口: 工业接口